- 论文原文:Exploring Evolution of Dynamic Networks via Diachronic Node Embeddings
- 作者:Jin Xu, Yubo Tao, Yuyu Yan, and Hai Lin
- 发表刊物/会议:2018 TVCG
文章提出了一种利用graph embedding的方法来探索动态图的方法。
一般而言,传统的动态图可视化方法可以分成三大类,基于动画的方法(animation),基于时间轴的方法(timeline),以及其他方法(如投影 projection)。基于动画的方法,往往会高亮相邻两帧之间的变化,但是当时间比较长的时候无法追踪变化;基于时间轴的方法,则将所有内容一起显示在同个视图中,但空间是个问题;基于投影的方法,把每一帧当做一个点,用投影的方法投影在一个视图中,但是很难展现图的结构的信息;
文章提出了一种同时展示结构属性和动态属性的可视分析方法。具体步骤如下:
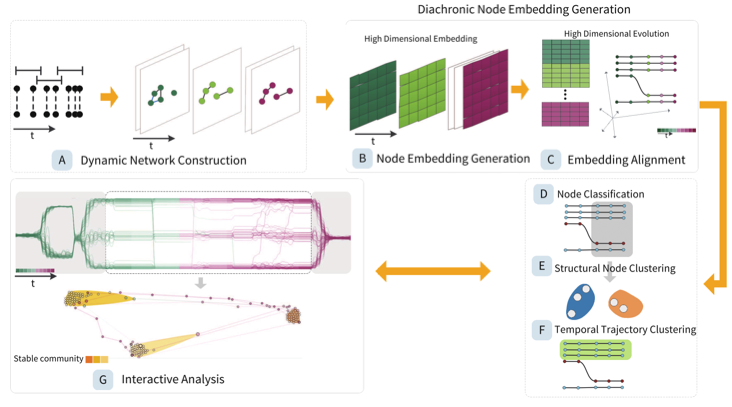
A生成动态图,B为动态图每一帧的每个节点生成embedding向量,C将这些embedding向量对齐到同一向量空间中,DEF利用embedding向量可以做的数据挖掘(节点分类,节点聚类,动态轨迹聚类),G可视交互分析;
文章的主要贡献有:
- 提出了一种新的节点embedding的方法
- 提出了两种基于节点embedding的动态图聚类方法
- 一个可视分析交互系统
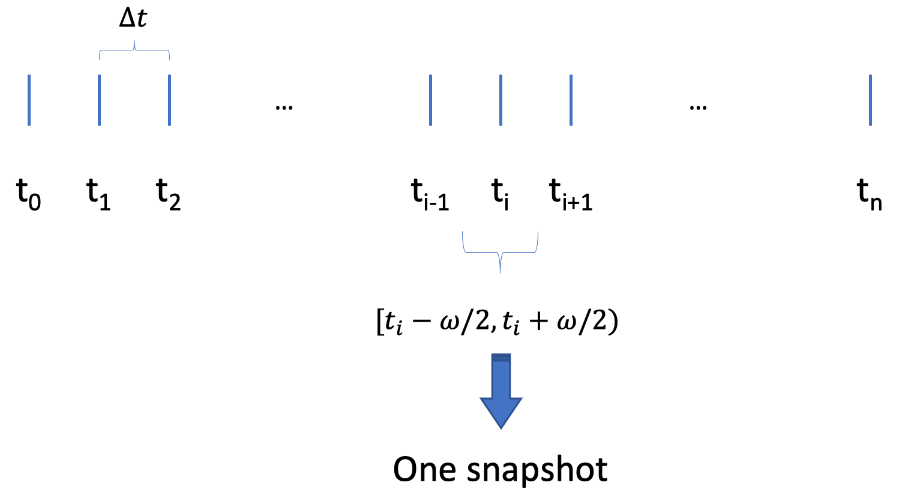
动态图的构建
首先,将动态图按照$\Delta t$的时间间隔,划分成多个时间片段,然后将$[t_i-\omega/2, t_i+\omega/2)$作为$t_i$时刻对应的动态图。
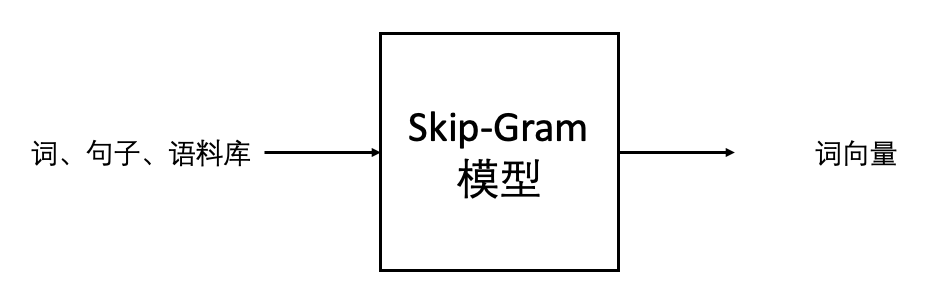
节点embedding向量的生成
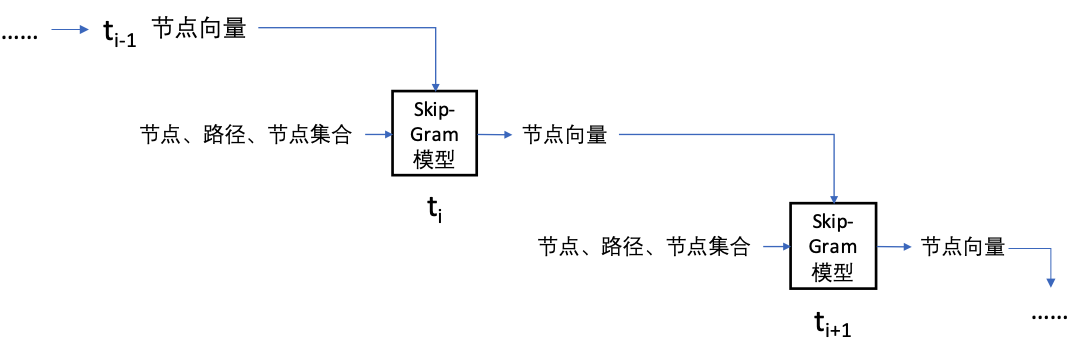
文章利用了skip-gram模型为单帧图的每一个节点生成embedding向量;
skip-gram模型可以理解为,当你输入一系列句子(sentences),以及包含这些句子中的词的语料库(corpus),skip-gram模型会为你预测语料库中的单词出现在某个指定的单词(word)附近的概率;这个过程中,会有一个重要的产物,叫做词向量,利用两个词向量的内积,我们就可以看到两个词在句子中共同出现的概率有多高;
skip-gram模型的目标函数,可以看做在最大化,同个句子中的相邻词汇的词向量的内积。
文章同样利用了skip-gram模型,做了如下修改:
用节点(node)替代词(word),用路径(path)替代句子(sentence),用节点集合(nodes set)代替语料库(corpus),于是也可以产生节点向量。
值得注意的有:
path的生成,靠的是random walk,假如图是一个有权图(weighted),那么random walk也需要依赖边权重。并且,为了提高效率,文章使用了负采样。
skip-gram模型的目标函数的修改。这里不仅仅要使得同一路径上的节点出现概率高,还要使得不相邻的节点共同出现的概率低:
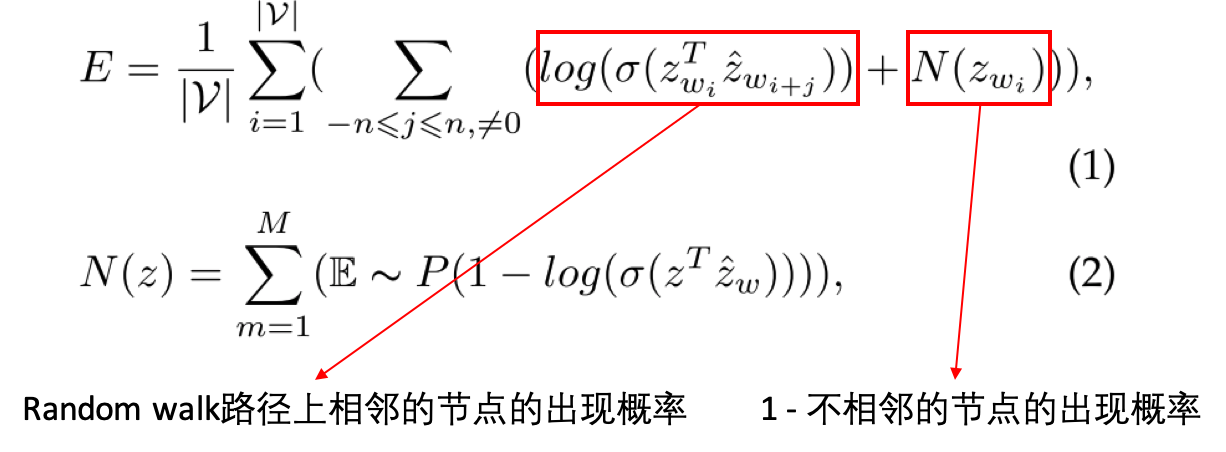
将上一帧产生的embedding向量,传入下一帧的skip-gram模型中,用以保持两帧之间的连续性:
embedding向量对齐
为了使得所有的embedding向量能够对齐到同一个向量空间中,方便比较和计算。所以这一步要对embedding向量进行正交变换,使得下面这个矩阵范数最小(也即差异最小):
$$
\left|M_{i} \Omega-M_{b}\right|_{F}
$$
其中$M_i$表示第$i$帧的向量构成的矩阵($n \times d$);$\Omega$指的是正交变换矩阵;$M_b$指的是基准矩阵,也就是所有embedding向量都要对齐到这个基准矩阵上来;$\left|*\right|_{F}$则是Frobenius矩阵范数。
关于$M_b$的选取,有三种不同的方法:
- 对齐到节点数最多的一帧(适合于变化较小的动态图)
- 对齐到前一帧(因为两帧之间的变化不大,所以误差会较小,但是不断对齐的过程中,误差就会累计)
- 将所有帧分成好几段,每一段都对齐到其中的某一帧(解决了上面的问题)
节点分类和聚类
节点的分类:
根据前后两帧之间节点embedding的变化,可以判断这个节点是dynamic(动态)还是stable(稳定)。
当前后两帧的节点之间的欧氏距离(文中叫做evolution value),大于阈值$\theta$时,则认为其为dynamic;
节点聚类:
可以用于揭示某一段时间内,稳定的社团结构。文章提出了稳定的概念,也就是大部分节点在这段时间内维持一个stable的状态。那么,在一段稳定时间内,将同一节点不同时间的所有向量求均值,就作为这段时间内该节点的向量。然后利用这些节点进行k-means聚类,即可得到不同的聚类(社团)。
趋势聚类:
如何对节点随时间变化的趋势进行聚类。两个节点随时间演化产生的两条轨迹,可以利用如下方法判断距离:
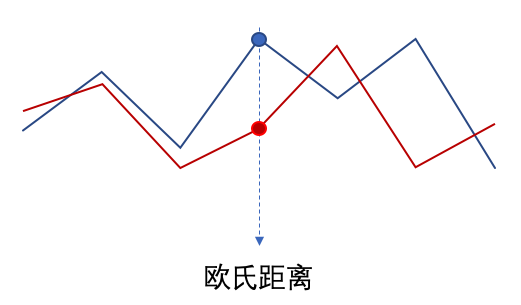
同一时刻,两个节点的向量求欧氏距离;所有时刻的所有欧氏距离的平均值,作为两条轨迹的距离。
利用knn graph,就可以对这些轨迹进行聚类。
系统界面
文章提出五个分析目标:
- 整体网络的演化分析
- 动态节点的演化分析
- 动态社团的时序分析
- 稳定社团的结构分析
- 将分析与网络的整体进行关联
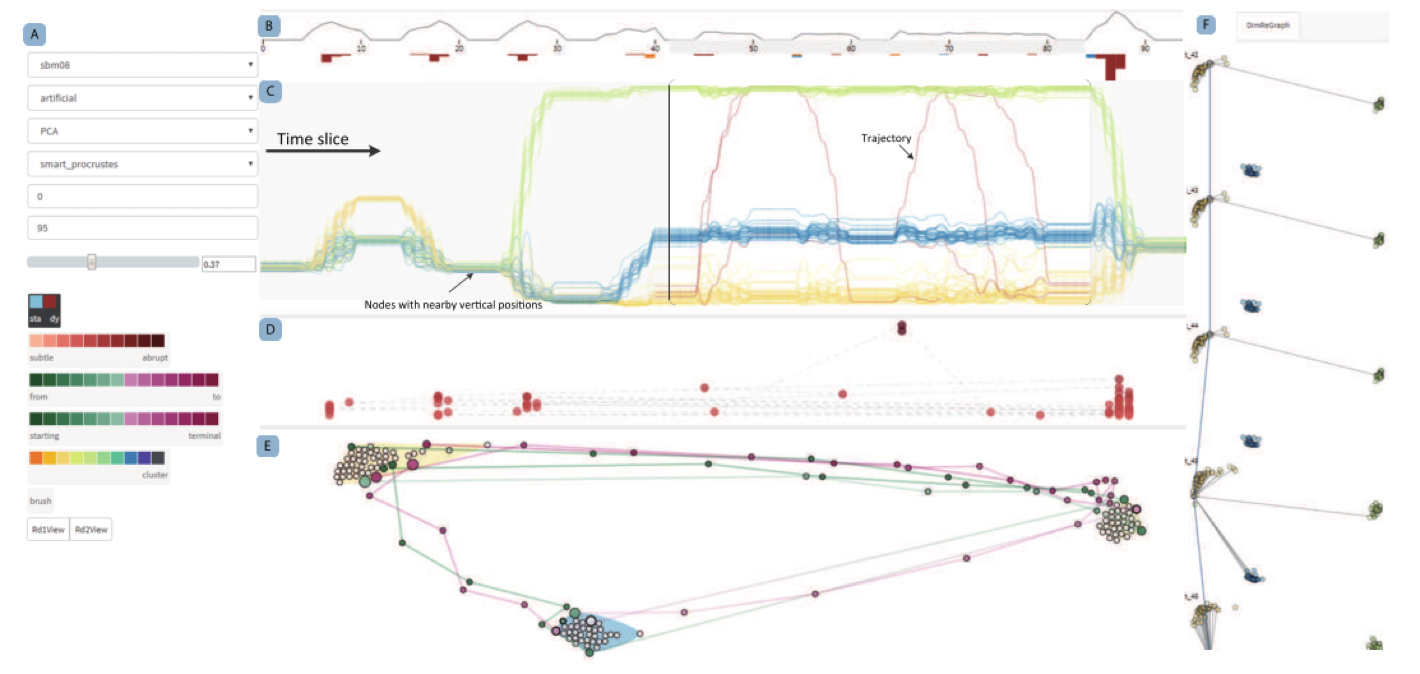
分析系统的视图与这五个目标对应:
控制面板(A)
统计视图(B)
对应目标1
横轴表示时间,纵轴表示网络的平均演变值(evolution value),用以刻画网络的整体趋势;其中的统计直方图分别用红、绿、紫分别表示动态节点数量,新出现节点数量和消失的节点数量。
节点视图(D)
对应目标2
横轴表示时间,纵轴则表示节点的演变值从低到高。只展示动态的节点,并且用黄到红的颜色映射来表示节点的演变值。
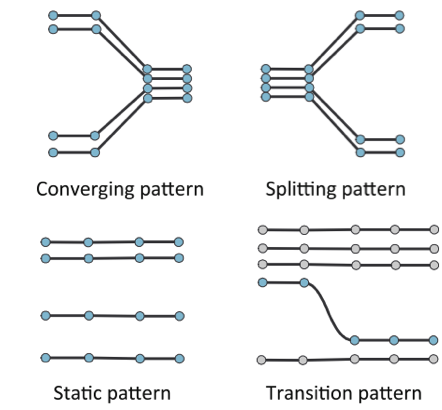
趋势视图(C)
对应目标3
横轴:时间;纵轴:利用PCA,将节点向量投影至1维,并用线连起来。可以看到很多不同的社团演化,其中比较特殊的有如下:
结构视图(E)
对应目标4
用PCA按照节点向量,投影至二维。
灰色表示稳定的节点,并且用大小来表示稳定的持续时间;动态节点则用了粉色-绿色的颜色映射来展示演变值。凸包围盒则用以概括不同的社团。
snapshot视图(F)
对应目标5
将以往探索过的结构记录在最右方。